Prof. Dr. Moritz Diehl, Dr. Dang Doan
Teaching assistant: Benjamin Stickan, Katrin Baumgärtner
This course (6 ECTS) provides basic understandings about control systems, using a state-space approach with the focus on linear dynamical systems. Students will learn how to represent dynamical systems with mathematical models, analyze them, and design feedback controllers and observers.
Schedule
2 sessions per week, each two hours:
Friday 10:00-12:00, starting 26.4, end 26.7.2019. (Location: SR 00 014, G.-Köhler-Allee 078) (changed)
Thursday 8:30-10:00, starting 2.5, end 25.7.2019. (Location: Room 01-012, G.-Köhler-Allee 102)
Monday 14:00-16:00, from 29.4 to 22.7. (Location: SR 00 031, G.-Köhler-Allee 051)
(break in the week 10-14.6)
In total: 50h of lessons and exercises. The exercises will be based on pen-and-paper exercises and computer exercises with MATLAB.
Final Exam
The final exam will take place on the 21st August 2019, 09:30 to 12:00, in SR 1 OG 009/013, G.-Köhler-Allee 101.
Content
|
Lessons |
Lecture date |
Exercise date |
Reading materials |
Recordings |
|
1. Dynamical systems and ordinary differential equations (ODE) |
26.4, Friday |
2.5, Thursday: Exercises on ODE, building and converting continuous-/ discrete-time linear models with MATLAB/Octave |
[1]: sections 3.1, 3.2, 5.1 |
Lecture 26.04.2019 ↘Download |
|
2. Nonlinear and linear systems, Discrete time and continuous time systems |
29.4, Monday |
[1]: sections 6.1, 6.2, 6.4 |
Lecture 29.04.2019 ↘Download |
|
|
3. Eigenvalues and stability, Lyapunov stability |
6.5, Monday |
9.5, Thursday |
[1]: sections 5.3, 5.4 |
Lecture 06.05.2019 ↘Download |
|
4. State feedback control, controllability, canonical form |
13.5, Monday |
16.5, Thursday |
[1]: section 7.1 |
Lecture 13.05.2019 ↘Download |
|
5. Eigenvalue assignment |
20.5, Monday |
23.5, Thursday |
[1]: section 7.2 |
Lecture 20.05.2019 ↘Download |
|
6. Linear quadratic regulator (LQR) |
27.5, Monday |
31.5, Friday, 13:00 (changed) |
[1]: section 7.5 |
Lecture 27.05.2019 ↘Download |
|
7. State estimation, Luenberger observer, observability, Kalman decomposition |
3.6, Monday |
6.6, Thursday |
[1]: sections 8.1, 8.2, 8.3 |
Lecture 03.06.2019 ↘Download |
|
8. Kalman filter |
17.6, Monday |
21.6, 13:00 Friday (changed, room 03-011, G. 102) |
[1]: section 8.4 |
Lecture 17.06.2019 ↘Download |
|
9. Linear quadratic Gaussian (LQG) control |
24.6, Monday |
27.6, Thursday Solutions: |
[1]: section 8.4 |
Lecture 24.06.2019 ↘Download |
|
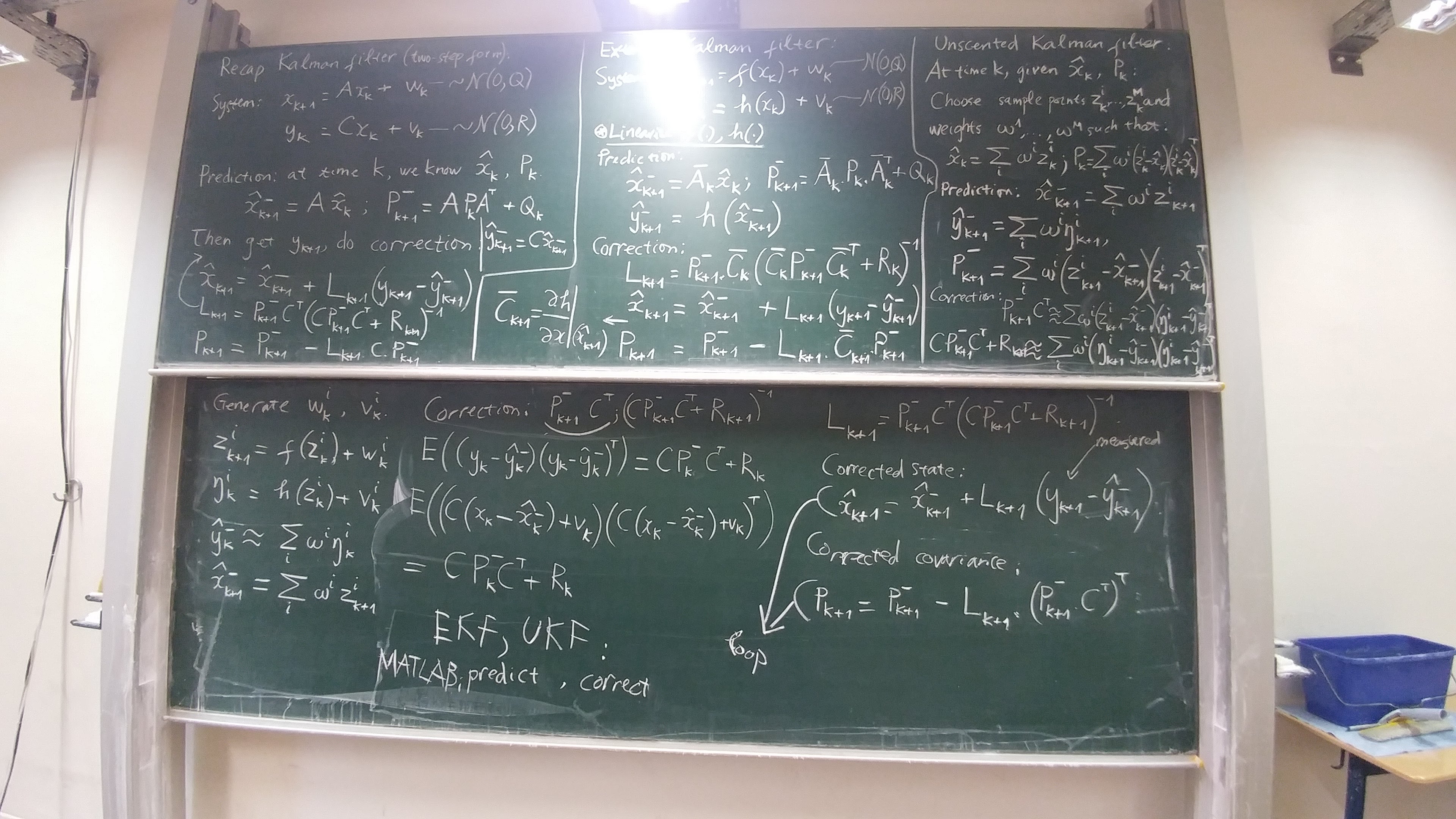
10. Extended Kalman Filter 11. Unscented Kalman Filter |
1.7, Monday |
4.7, Thursday |
[2]: section 4.5.2 [2]: section 4.5.3 |
Lecture 01.07.2019 ↘Download |
|
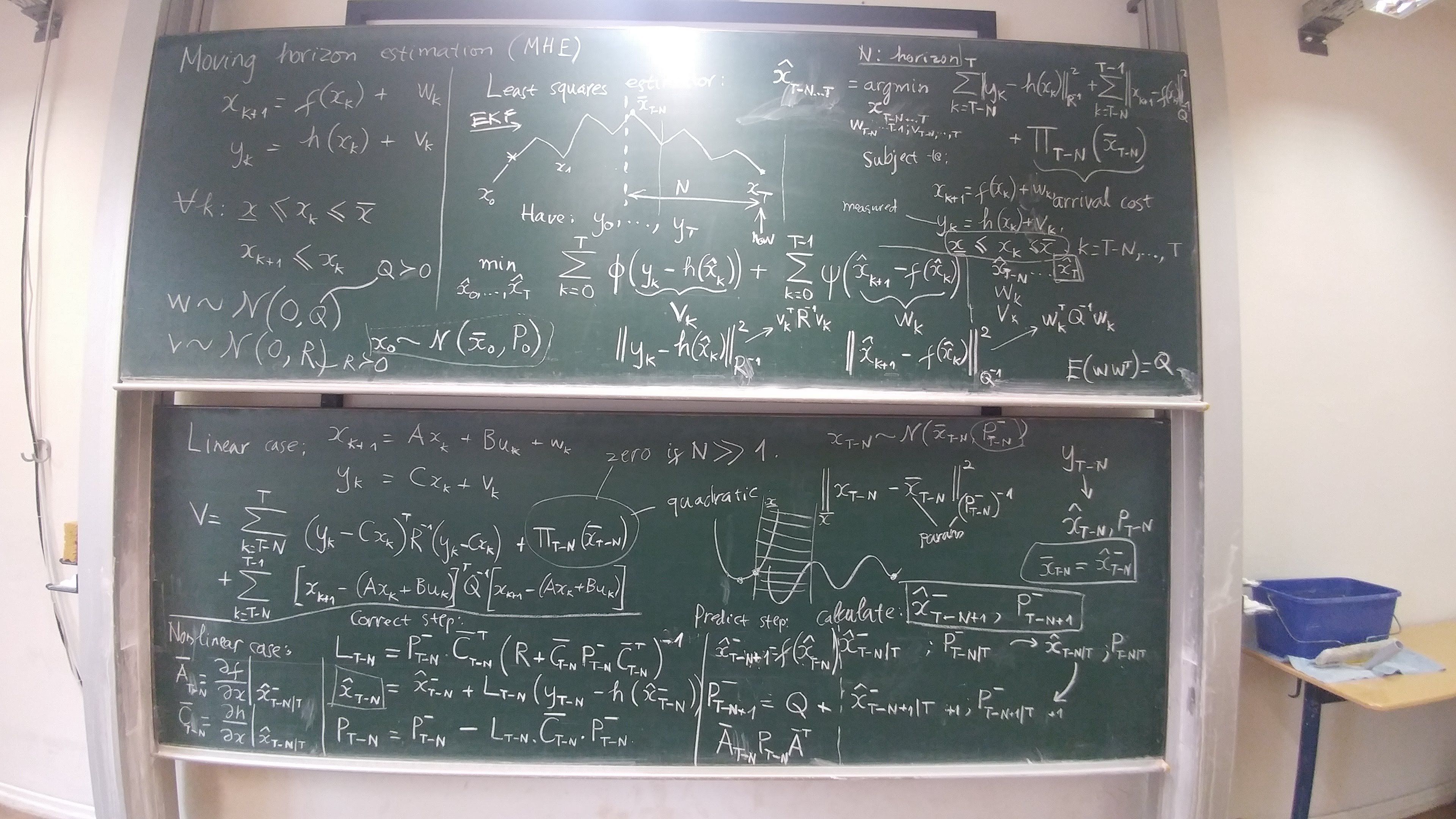
12. Moving horizon estimation |
8.7, Monday |
11.7, Thursday |
[2]: sections 1.4, 4.3 |
Lecture 08.07.2019 ↘Download |
|
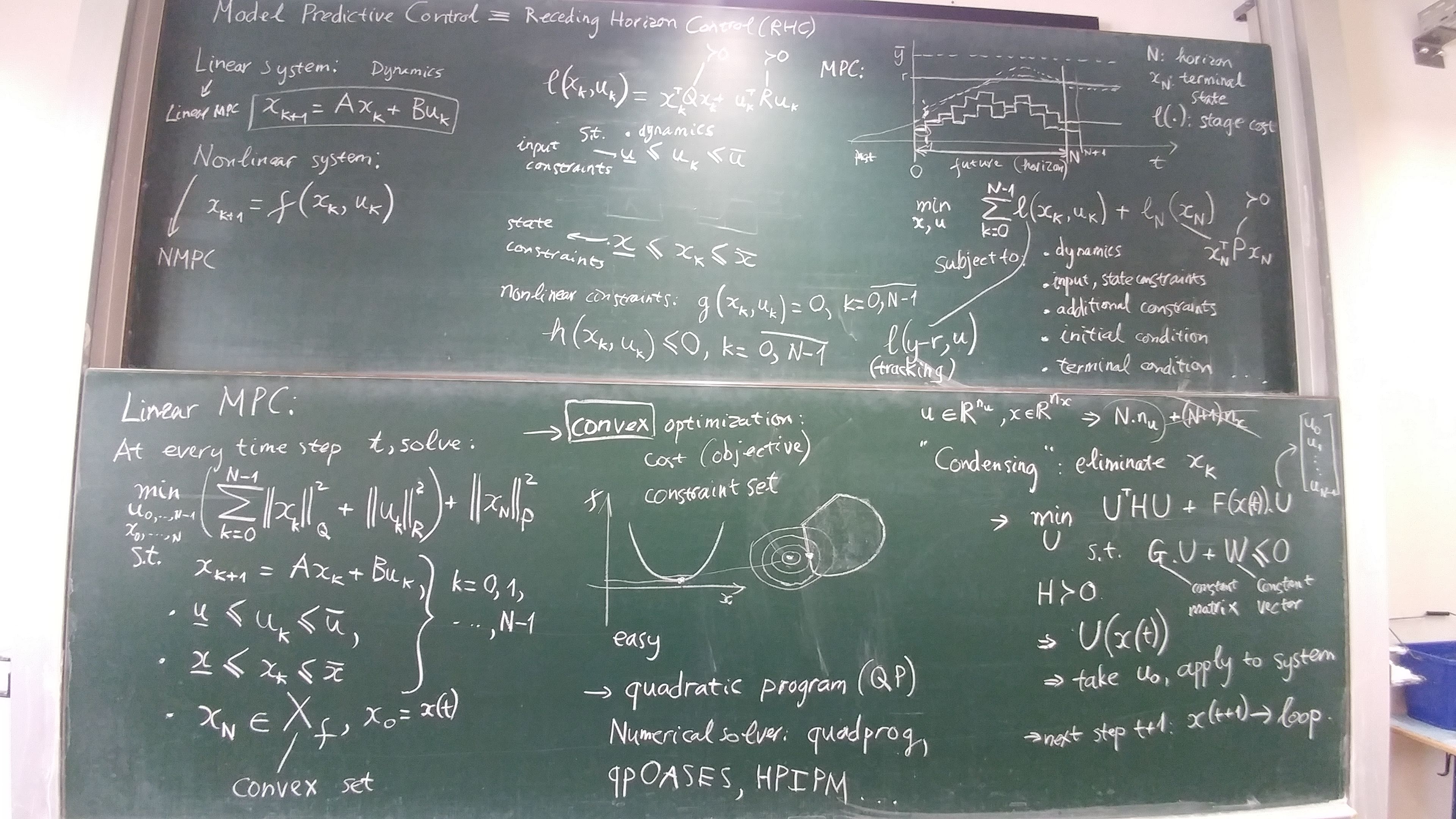
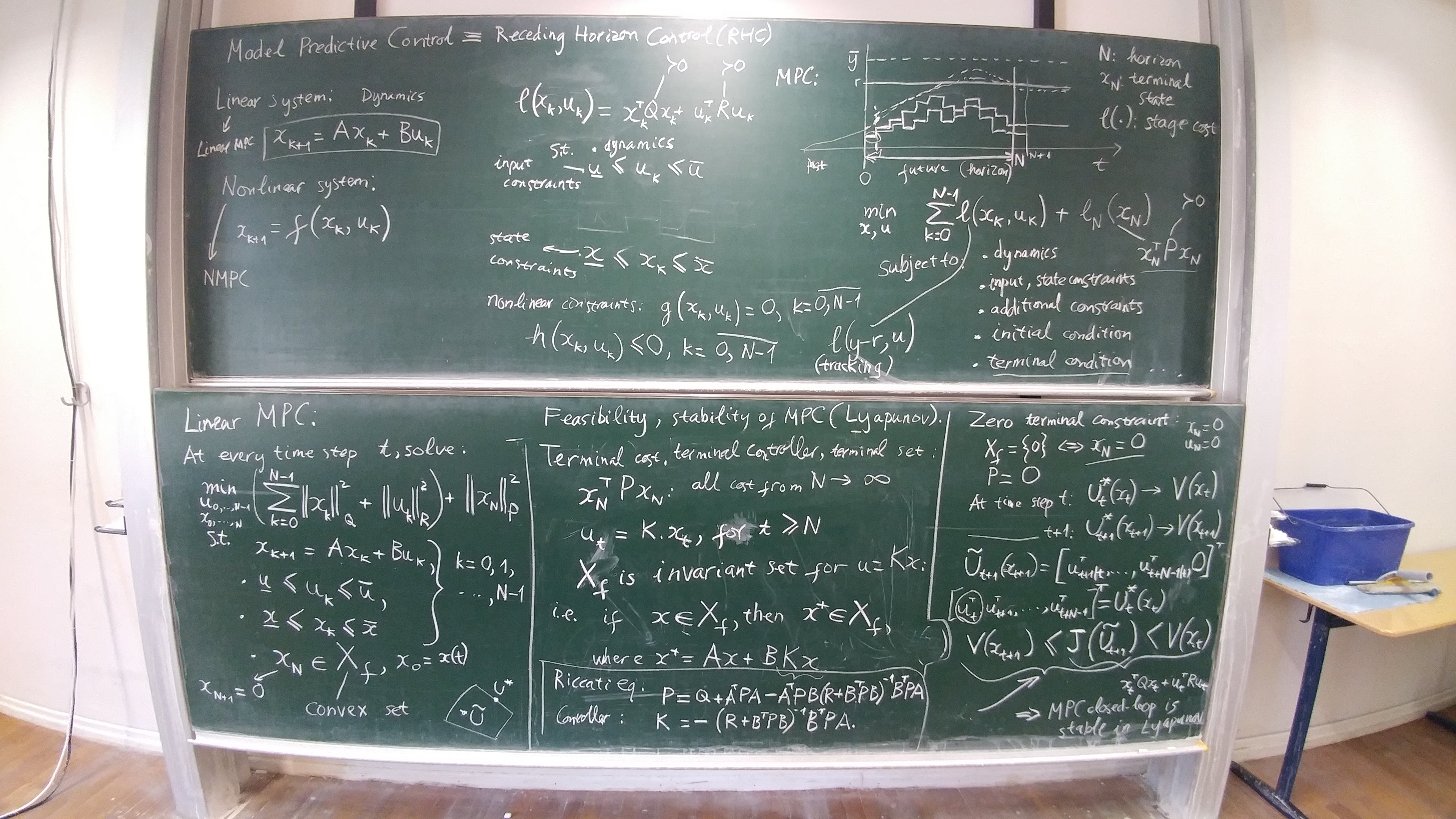
13. Model predictive control |
15.7, Monday |
18.7, Thursday Template for Matlab code: |
[2]: section 1.3 |
Lecture 15.07.2019 ↘Download |
|
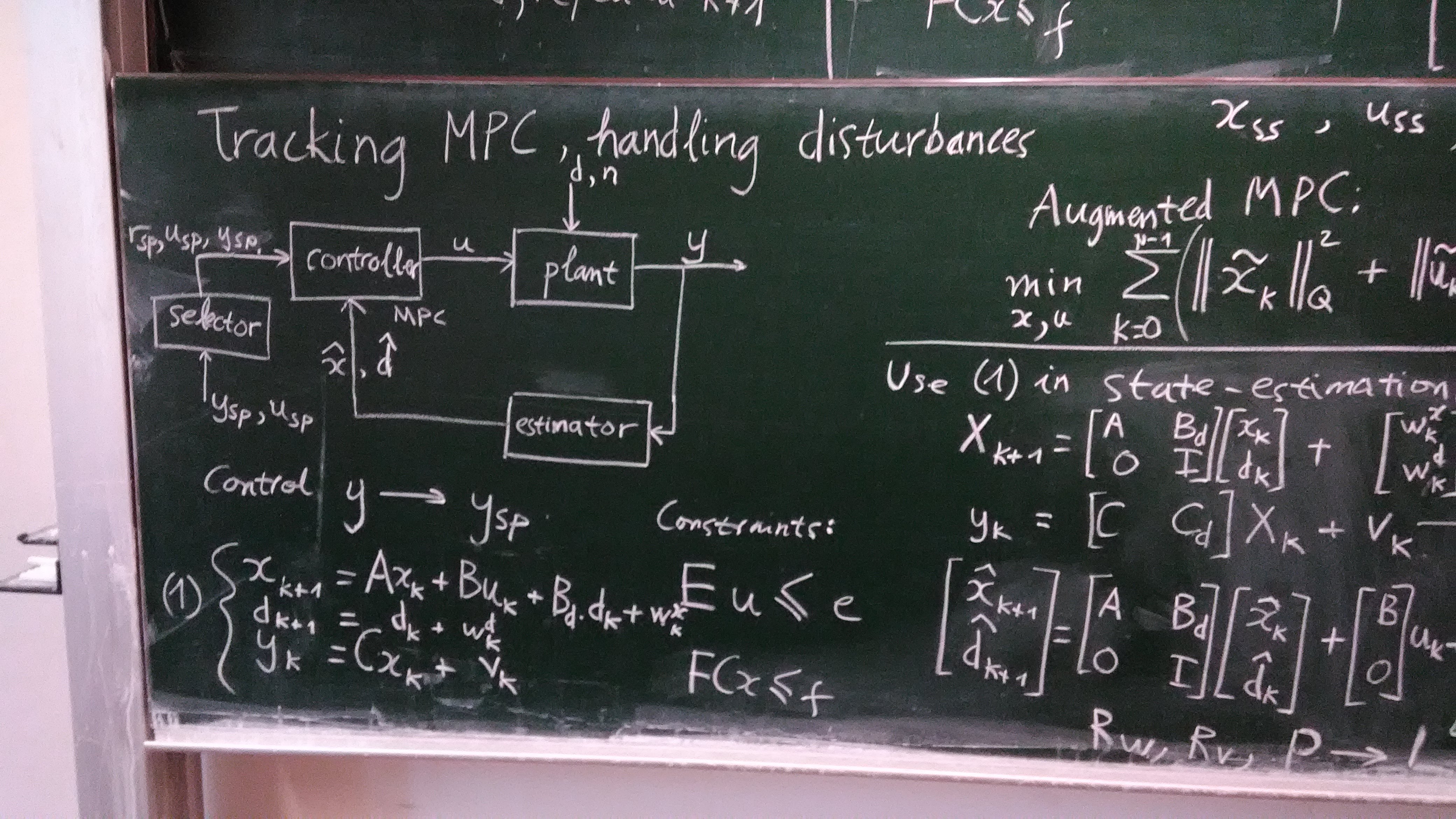
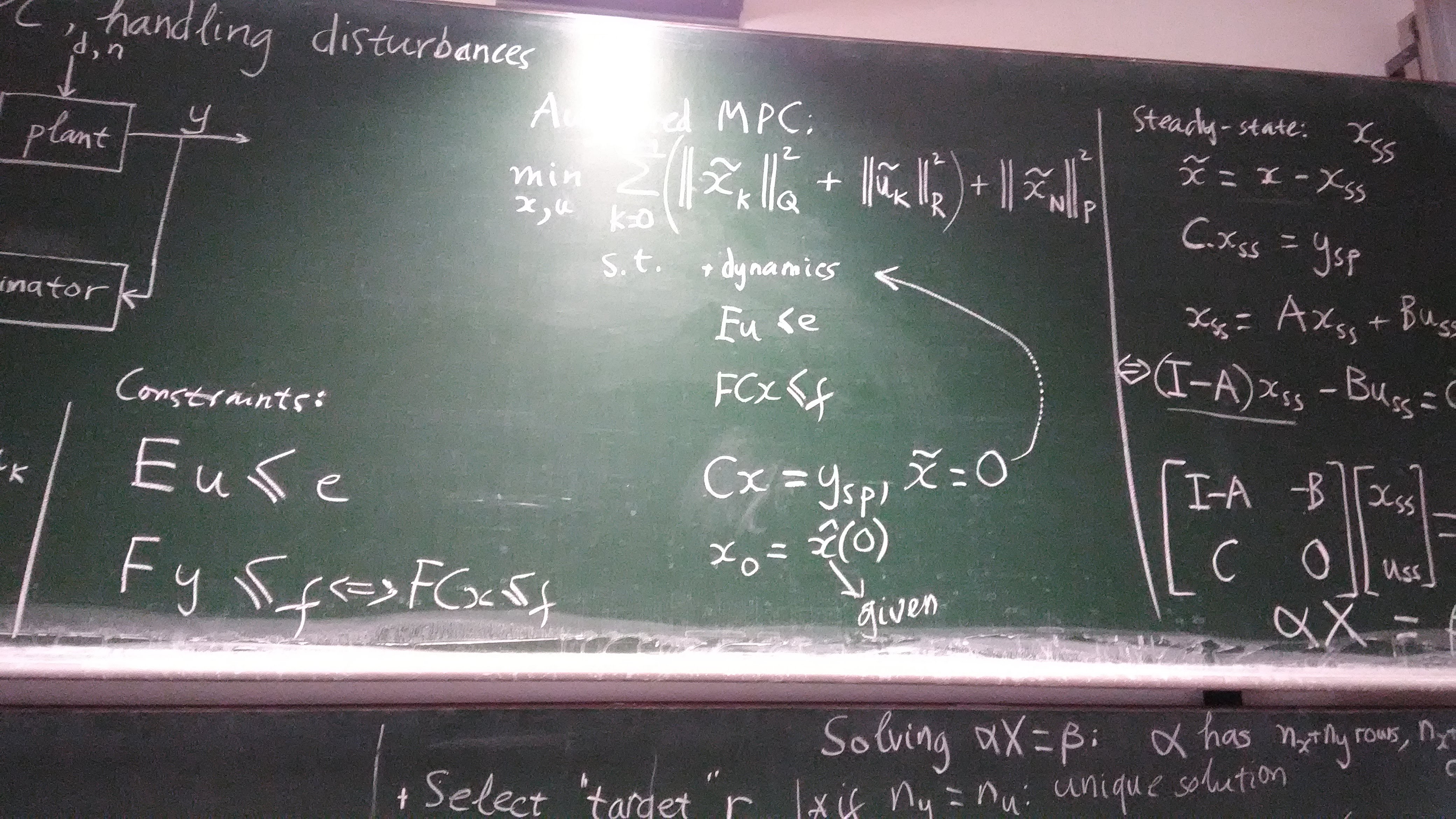
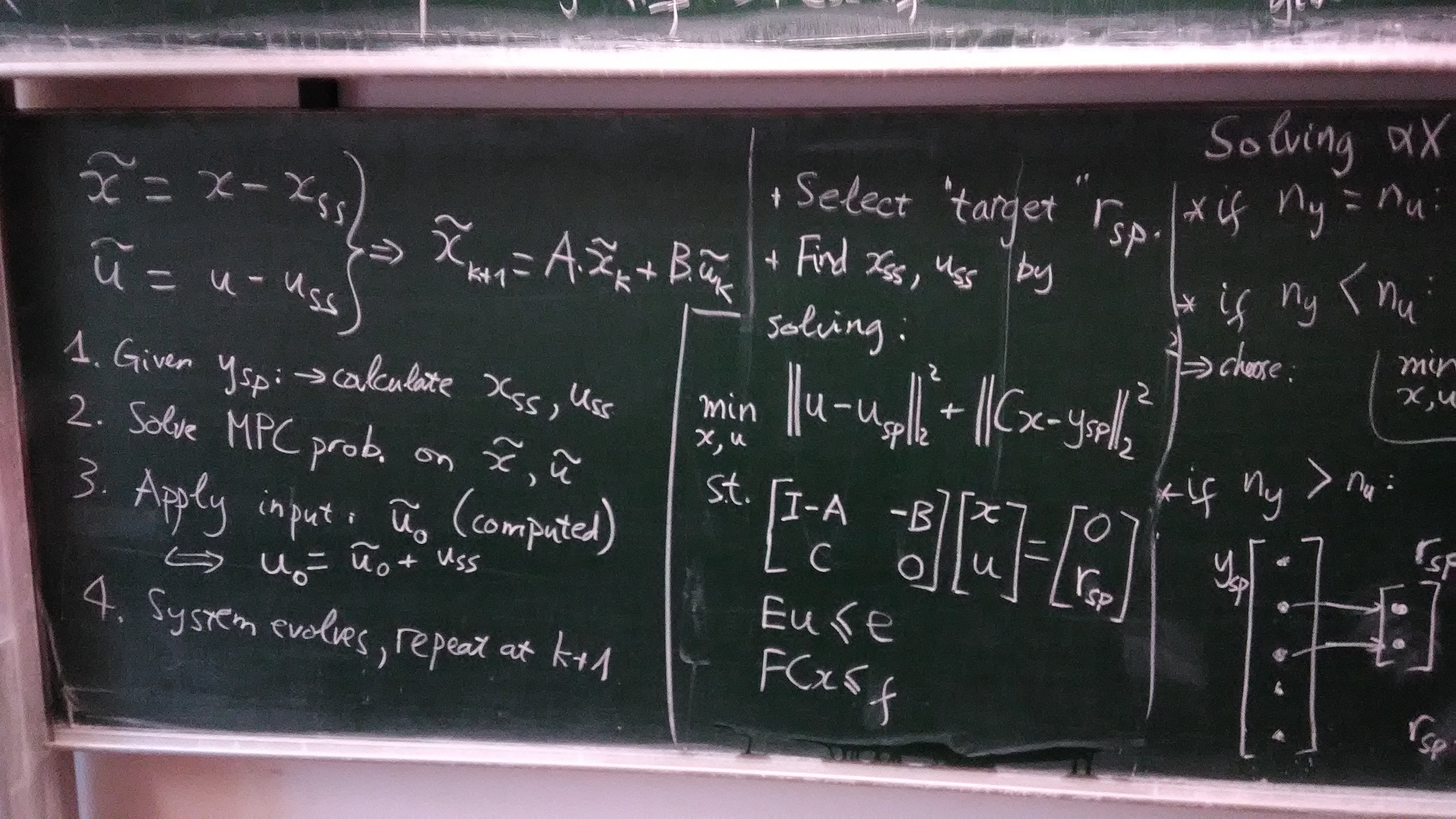
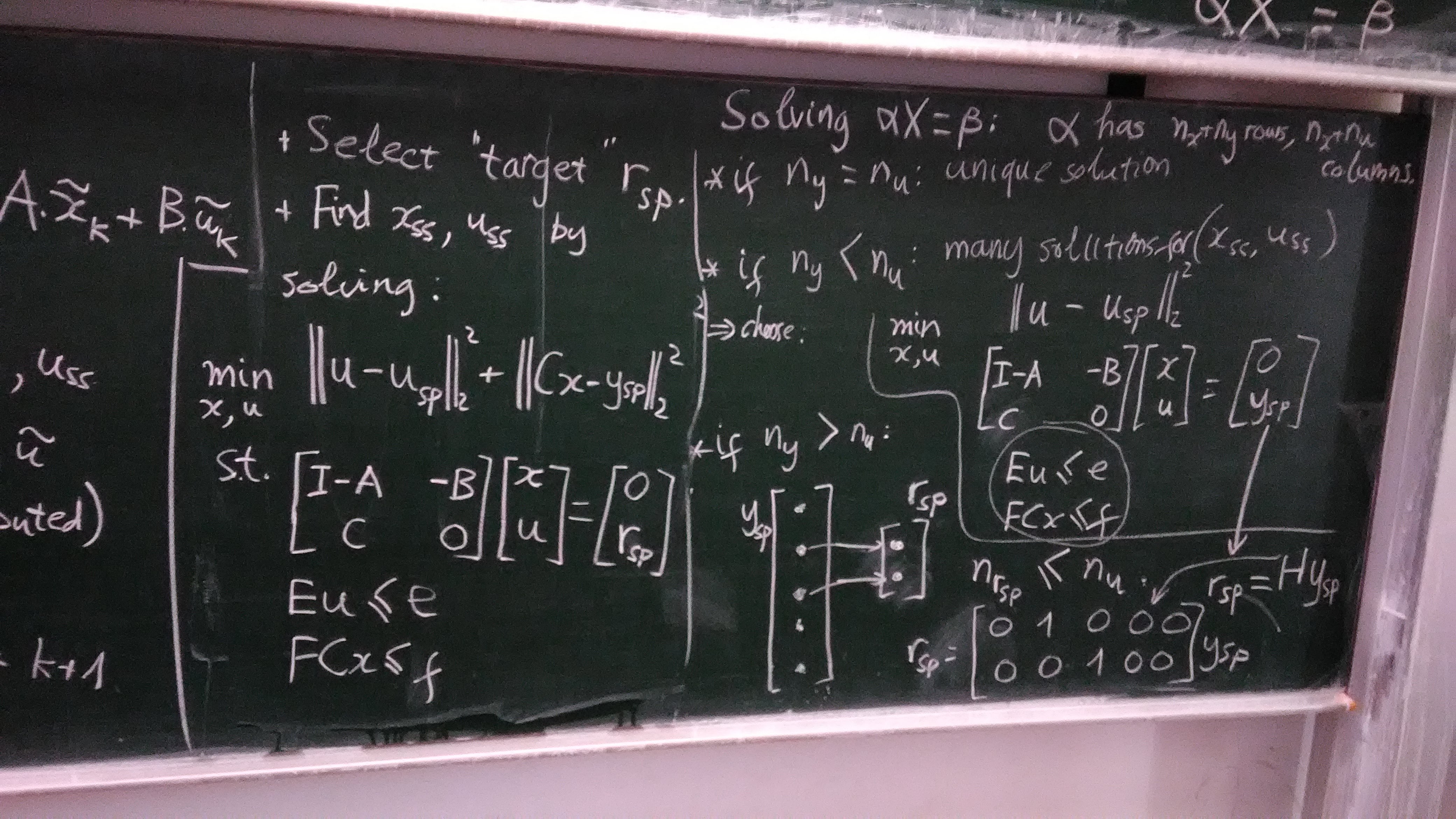
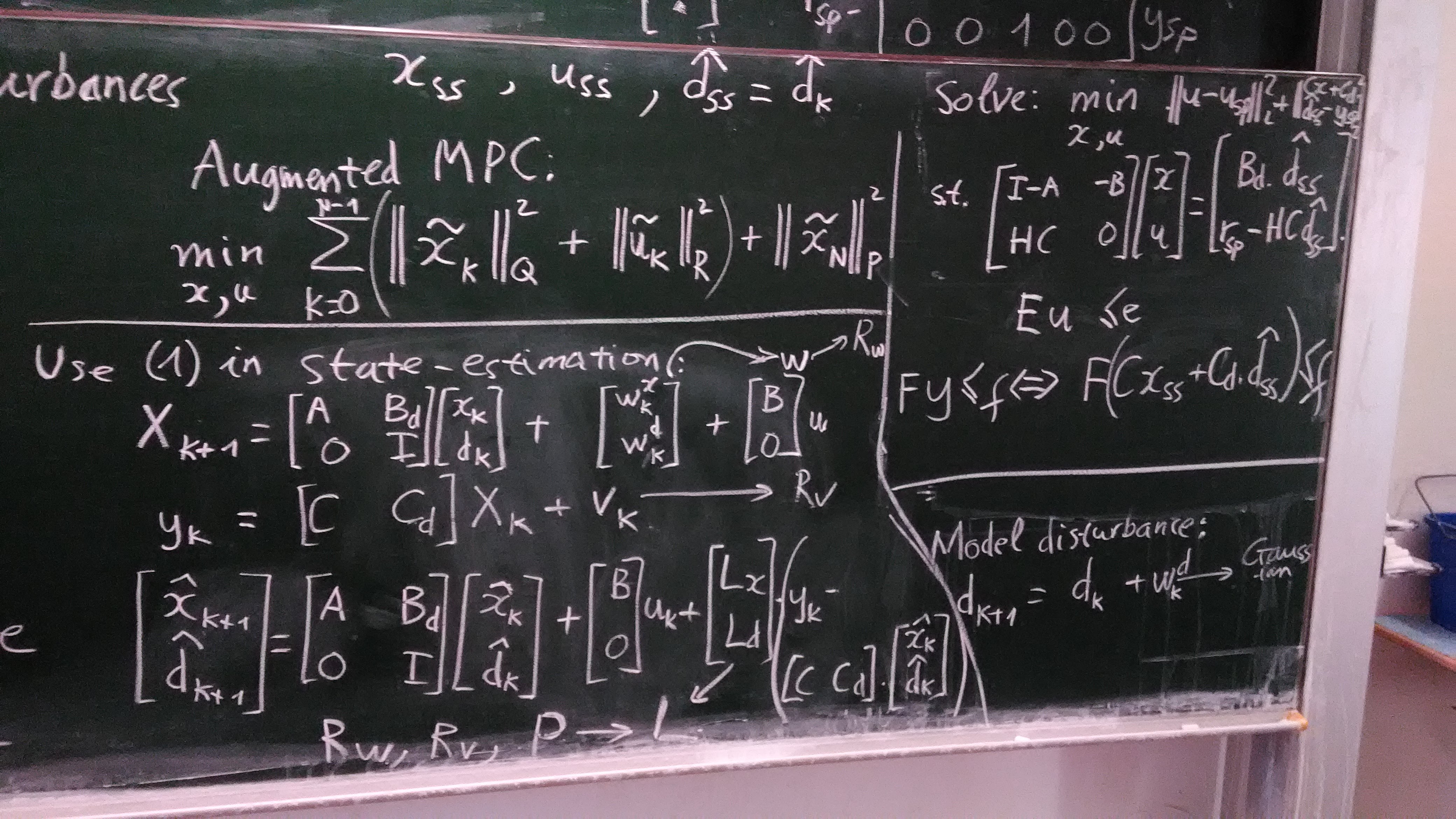
14. Tracking MPC and Disturbance modeling |
22.7, Monday |
25.7, Thursday
|
[2]: section 1.5 |
Lecture 22.07.2019 ↘Download |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
14.8.2019 (Wednesday), 10:00 - 12:00, Room 01-012, Building 102
Exam questions: SSCS_ss2019_Exam.pdf
Solution: SSCS_ss2019_Exam_solution.pdf
Course materials
- Feedback Systems by Karl J. Åström and Richard M. Murray. Ebook provided online: http://www.cds.caltech.edu/~murray/amwiki/index.php
- Model Predictive Control: Theory, Computation, and Design by James B. Rawlings, David Q. Mayne, and Moritz M. Diehl. Ebook provided online: https://sites.engineering.ucsb.edu/~jbraw/mpc/
- Lecture Notes by Michael Erhard, Gianluca Frison, Moritz Diehl
- Control Tutorials for MATLAB and Simulink: http://ctms.engin.umich.edu/CTMS/